Programme méconnu, objet ''oublié'' même des passionnés, le LAMA a pourtant de quoi séduire.
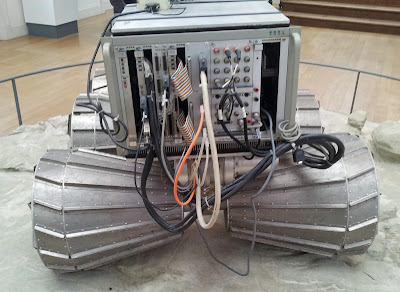
Le prototype se trouve au Musée des Arts et Métiers à Paris.
(Crédit photos : Stéphane Sebile / Space Quotes - Souvenirs d'espace)

En 1995, Alcatel Space Industries acquiert
un châssis Marsokhod auprès de VNII
Transmash qui l’a conçu au début des années 1990 pour l’exploration de Mars.
Ce Marsokhod prend alors le nom de LAMA pour Lavochkin
Alcatel Model Autonomous.
Le LAMA
est mis à disposition du Laboratoire d’Analyse et d’Architecture des Systèmes (LAAS) qui est un des grands
laboratoires de recherche du Centre National de Recherche Scientifique (CNRS).
Le LAAS
a été créé en 1968 et portait alors le nom de Laboratoire d’Automatique et de
ses Applications Spatiales (LAAS) et est situé à Toulouse, sur le complexe
spatial de Lespinet.
Le Marshokhod était un prototype de
rover martien tous-terrains développé par les russes dans le cadre des projets
Mars 4NM et Mars 5NM.
Ces projets étaient deux sondes
martiennes dont le but final était un retour d’échantillon martien.
Selon les plans de l’exploration
spatiale russe en 1970, ces sondes martiennes auraient dû être lancées après
1973 par la fameuse fusée N-1. Mais le projet fût abandonné en 1974, en même
temps que l’abandon de la N-1, qui ne vola jamais.
Cette mission martienne était composée
en deux parties : La première partie, Mars
4NM aurait déposé le Marsokhod sur la surface martienne, et dans un second
temps, la mission Mars 5NM aurait
récupéré les échantillons martiens et serait revenue sur Terre pour 1975.
Le châssis constituant le LAMA est un
châssis construit aux débuts des années 1990 par Lavochkin basée sur les plans
du Marsokhod prévu pour la mission Mars 4NM.
Lors de son acquisition, le LAMA est
seulement un châssis tous-terrains avec six roues sur essieux mobiles
indépendants, et livré avec une boite bleue au-dessus de celui-ci, boite qui est
le centre de commandes d’actions simples pour avancer en ligne droite et pour
des virages simples. Ces actions de manœuvrabilité sont à deux vitesses.


A la fin de 1995, Alcatel ajoute une
boussole magnétique et un inclinomètre à deux axes.
Sont également ajouté deux tableaux de
contrôles avec processeurs Motorola de 68040 et Power PC, pour mieux contrôler
les mouvements du rover et collecter des informations afin d’anticiper ceux-ci
(sur Mars, le temps de réception des ondes radio avec la Terre est de près de
20 min).
Début 1996, le LAMA arrive au LAAS.
Plusieurs équipements sont ajoutés comme
un laser-scanner deux axes qui n’a jamais vraiment bien fonctionné.
Les roues sont équipées d’un encodeur
optique haute résolution.
La boite de contrôle bleue a été changée pour laisser place à un tableau de contrôle des mouvements beaucoup plus performant.
La boite de contrôle bleue a été changée pour laisser place à un tableau de contrôle des mouvements beaucoup plus performant.
Deux petites caméras, en stéréovision 3D
couleur, montées en haut d’un mât, collectent les images.
Les batteries sont également
transformées et changées, notamment celles des roues.
Un deuxième récepteur d’images noir
& blanc est installé à l’avant.
Un gyroscope, odomètre, inclinomètre
sont également installés.






Fin 1997, le LAMA commence vraiment à
ressembler à un véritable rover.
En 1997, le petit rover martien de
la NASA Sojourner se retrouve bloqué sur
la surface martienne par un rocher.
Le LAAS prend alors la décision d’améliorer
le système de guidage du LAMA en adjoignant à celui-ci une sorte de compagnon
qui l’aidera à se déplacer et à prendre ‘’seul’’ certaines décisions. La boussole
est donc remplacée par un gyromètre à fibre optique et un GPS est installé afin
de calculer les trajectoires en fonction de la localisation.
Pour ce faire,
bien sûr, il faudra un satellite en orbite qui suive le LAMA.





Savoir se localiser et anticiper ses
mouvements dans un environnement inconnu est obligatoire pour un futur rover
explorateur. C’est ce que l’on appelle un rover autonome.
De plus, le LAMA était capable de se
composer une carte au fur et à mesure de ses déplacements. Il était capable de
faire la différence entre deux points précis.
A la fin du programme, les ingénieurs
avaient commencé à mettre au point un système qui permettait au LAMA de pouvoir
distinguer et interpréter certaines couleurs, et ainsi pouvoir mieux se mouvoir
sur une surface inconnue.
Il a aussi été testé des opérations
entre le LAMA et un ballon KARMA (pour
un projet de robots volants Robea),
où le ballon cartographiait les lieux et les transmettait au LAMA au sol afin d’améliorer
sa progression. On voit ici que l’intérêt spatial du LAMA peut trouver des
applications bien terrestres comme pour des opérations militaires ou pour l’incendie
(feux de forêts, etc…).
Le programme d’étude du LAMA prend fin
en 2002.




Ce commentaire a été supprimé par un administrateur du blog.
RépondreSupprimer